样品
成果详情
| 项目简介 | |||||
|---|---|---|---|---|---|
| 技术简介: | |||||
| 专利类型: | 发明 | 专利申请号: | CN201610806119.7 | 公开号: | CN106562866A |
| 专利权人: | 南方医科大学南方医院 | 发明设计人: | 黄广龙;张喜安;彭俊祥;潘军;漆松涛;殷延毅;苏青;莫益萍;邱晓瑜 | ||
| 所属领域: | |||||
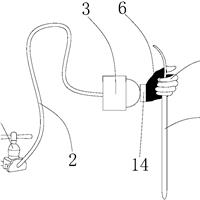
| 摘要: | 本发明公开了神经内镜用带仿真手掌全方位机械手臂,包括可固定在手术床的固定底座、万向软管、可360度调节位置的调节装置,调节装置由万向球底座、万向球组成,万向软管一端固定在固定底座上、其另一端与万向球底座底面连接,万向球一端置于万向球底座内,另一端连接有仿真手掌,仿真手掌上包括若干设置为可随意弯曲成弧形的手指,手指开设有卡口,还包括神经内镜,神经内镜一端部置于仿真手掌上,神经内镜该端部上设有定位件,仿真手掌呈端酒杯状夹持神经内镜该端部,且卡口卡住定位件。本发明的优点是:神经内镜固定效果好;能有效避免在调节神经内镜时出现损坏情况;调节位置更精确,实现全方位调节,实现双手解放,减轻医生的手术负担。 | ||||
| 补充信息 | |||||
| 转让方式: | 成熟度: | 预估价值: | |||
| 市场前景: | |||||