样品
成果详情
| 项目简介 | |||||
|---|---|---|---|---|---|
| 技术简介: | |||||
| 专利类型: | 发明 | 专利申请号: | CN202311493922.6 | 公开号: | CN117224242A |
| 专利权人: | 南方医科大学南方医院 | 发明设计人: | 李和平 | ||
| 所属领域: | |||||
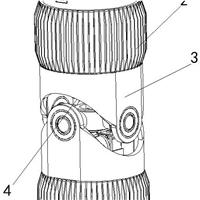
| 摘要: | 本发明提供了一种用于远程手术机器人的旋转驱动装置,包括十字轴、两个缓冲单元和两个驱动单元;两个缓冲单元、两个驱动单元分别上下相对设置,十字轴设置在两个驱动单元之间;驱动单元包括基座、偏转驱动组件、连接座和旋转驱动组件;本发明采用紧凑的结构设计,可以有效减小机械臂的尺寸,降低了手术机器人的空间占用;提供更大的旋转自由度,使手术机器人的机械臂可以在更广泛的范围内进行运动;更高的旋转自由度,提高了手术机器人的适用性;使手术室内的辅助人员在手术床边离患者的位置更近,便于观察手术状况,出发情况时能够第一时间进行紧急处理,具备高度的安全性,能够确保手术操作的准确性和稳定性。 | ||||
| 补充信息 | |||||
| 转让方式: | 成熟度: | 预估价值: | |||
| 市场前景: | |||||